
Pago seguro
Envío en 24/48h (excepto productos en reserva)
Asesoramiento técnico
ROBOT AUTOKIT
AGILEX AUTOKIT
El KIT de desarrollo de conducción autónoma de código abierto. KIT de desarrollo de conducción autónoma basado en el framework de código abierto Autoware.
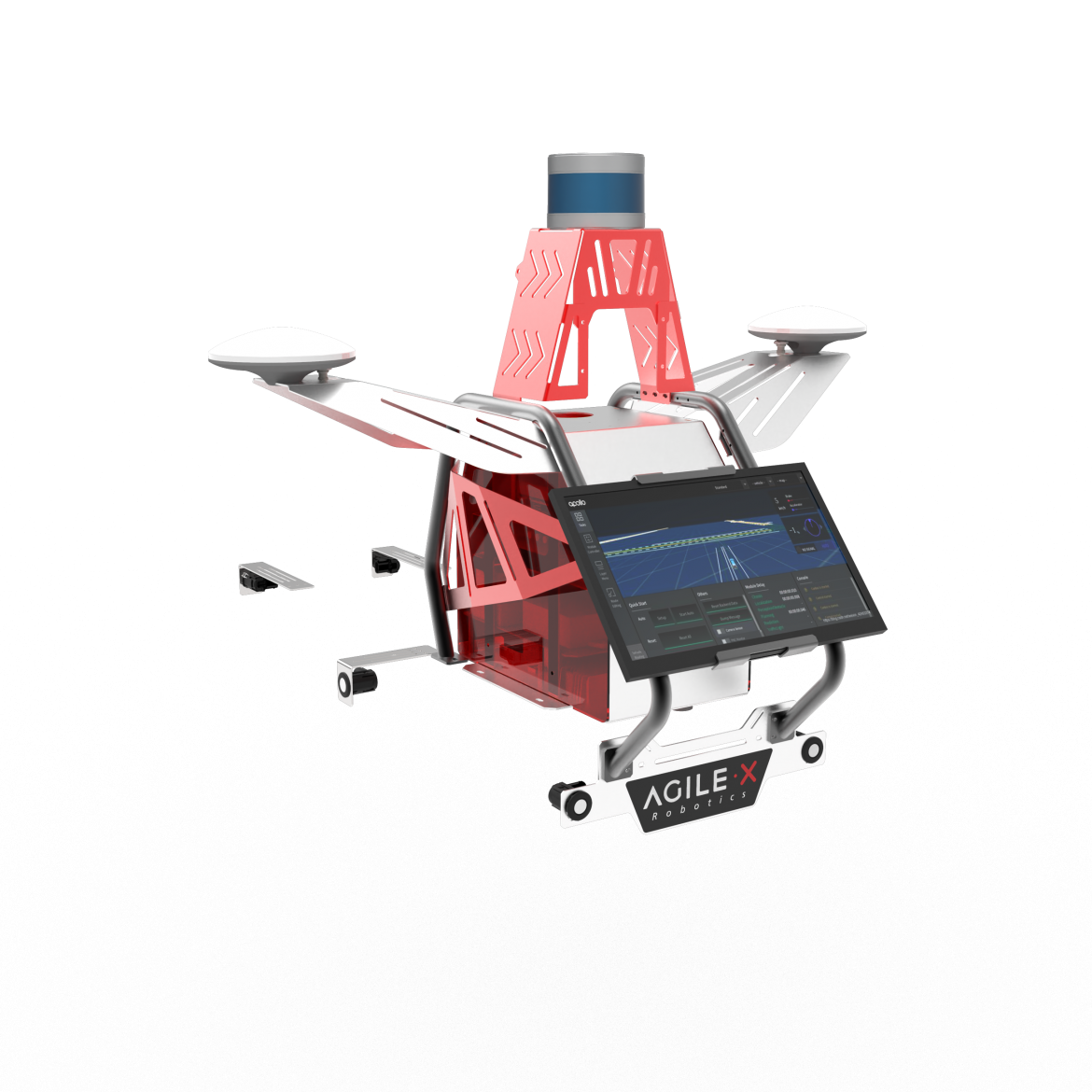
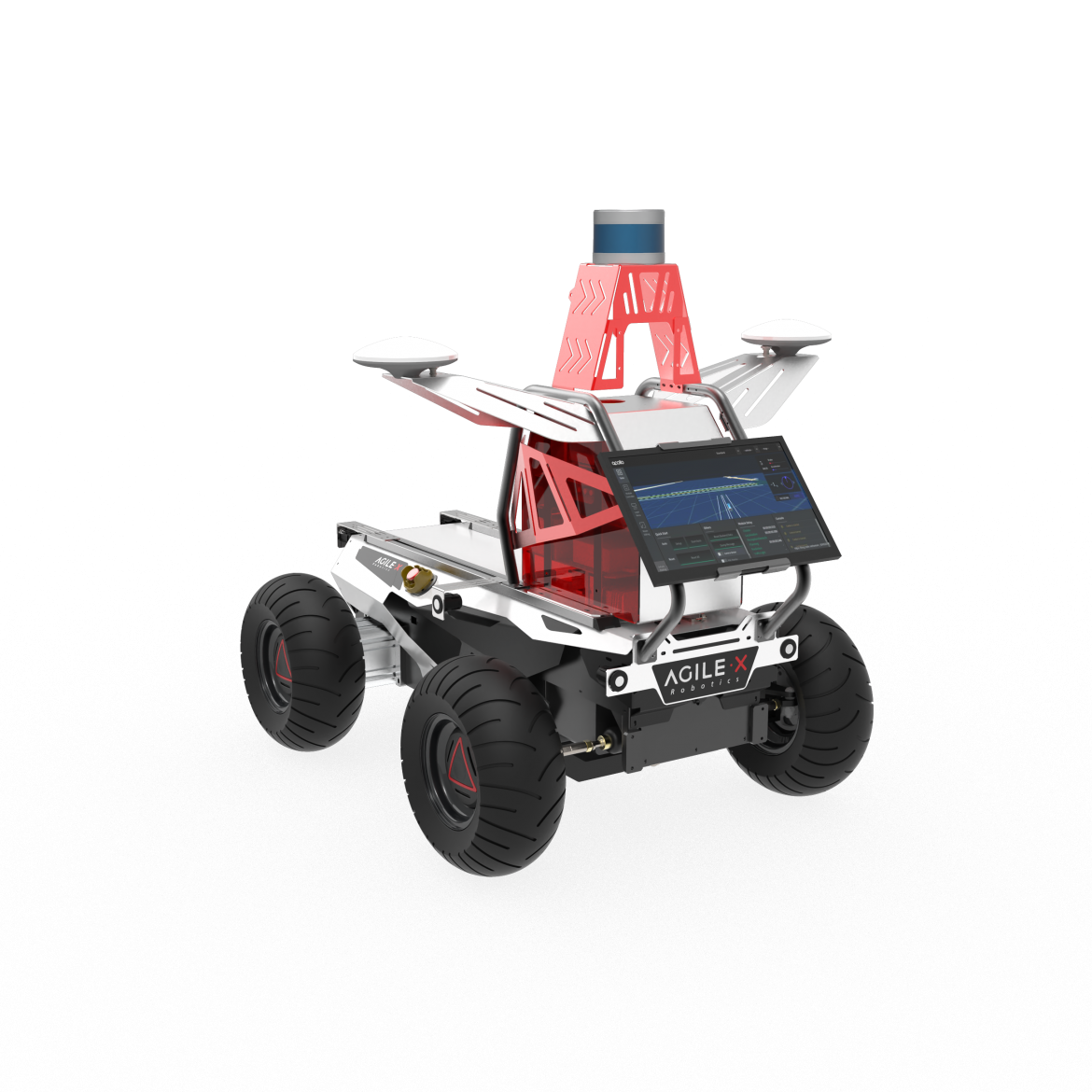
AutoKit es un kit educativo y de desarrollo de conducción autónoma completo y rentable basado en el software de código abierto Autoware. Proporciona un potente sistema de sensores de conducción autónoma que se integra perfectamente en una variedad de chasis de robots todo terreno, para adaptarse tanto a entornos urbanos como todoterreno.
Con pilas de plataformas de software y hardware, además de guías de usuario integrales, AutoKit permite a los expertos educativos y a los desarrolladores de la industria implementar fácil y rápidamente robots autónomos y desarrollar investigaciones sobre conducción autónoma en diversas industrias, para construir y verificar algoritmos de conducción autónoma, ahorrando costos de investigación y desarrollo y generando energía, más posibilidades.
KIT DE DESARROLLO DE SISTEMA AUTÓNOMO UGV+ INTEGRAL
LiDAR confiable de 16 haces
- ±2 cm de precisión ultraalta
- Nube de puntos rica de 600.000 pts/s
- Distancia de percepción de hasta 150 m
Sistema de hardware+software de pila completa
- Sistema de control industrial X86 de alto rendimiento
- Pantalla estándar y soporte industrial.
- Nodos ROS preinstalados
ADÁPTESE A UNA VARIEDAD DE CHASIS DE CONTROL POR CABLE PARA ESCENARIOS TODOTERRENO
HUNTER 2.0
- Dirección Ackerman
- Carga de 150 kg.
- Carretera convencional
BÚNKER
- Dirección con ruedas de orugas
- Suspensión Christie
- Cruce y escalada de obstáculos al aire libre
SCOUT2.0
- Rotación del diferencial en las cuatro ruedas
- Suspensión independiente
- Cruce y escalada de obstáculos al aire libre
RANGER MINI
- Dirección omnidireccional
- Cuatro tipos de movimiento
- Movimiento de espacios estrechos e irregulares
Inicio rápido del desarrollo de la conducción autónoma
- Planificación autónoma de rutas
- Mapeo de nubes de puntos 3D
- Evitación autónoma de obstáculos
Documentos enriquecidos y soporte técnico para desarrolladores principiantes y avanzados
- Casos de aplicación integrados
- DEMO rica ROS
- Manual de usuario
- Apoyo técnico
Aplicaciones
- Educación
- Proyecto de investigación
- Conducción autónoma
- Robot autónomo
ESPECIFICACIONES
|
Incluye |
Tabla de lista de configuración |
|
Aplicaciones |
8 núcleos 8 hilos 3,0 GHz Tamaño máximo de memoria 32 GB |
|
Lidar multilínea RobosenseRS-LiDAR-16 |
16 canales, longitud de onda de 905 nm, Precisión +-2 cm (típica), Rango de medición de 20 cm a 150 m (en un objetivo de reflectividad del 20 %), velocidad de datos 320.000 pts/s
|
|
Módulo de visualización |
Pantalla de cristal líquido cable mini hdmi a hdmi Cable USB a tipo C
|
|
Comunicación |
Módulo USB a CAN |
|
Módulo de poder |
24V a 12V 24V a 19V |
|
Módulo de comunicación |
intercambiador |
|
Productos compatibles |
HUNTER HUNTER 2.0 SCOUT 2.0 BÚNKER |
|
CARACTERÍSTICAS |
|
Control por cable de la introducción del vehículo, control del vehículo por ROS |
|
Utilice nube de puntos 3D para localización y navegación |
|
Planificación de caminos evitando obstáculos |